ABB機器人Pdisp 軌跡偏移使用
1) 如果有下圖兩個產(chǎn)品����,已經(jīng)完成了右邊產(chǎn)品軌跡,左邊產(chǎn)品估計一樣�����,如何快速生成左邊軌跡(左邊產(chǎn)品可能有平移和旋轉(zhuǎn))
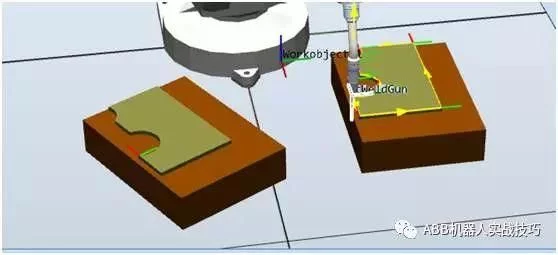
2)完成右邊軌跡示教Path_30���,如上圖。起點為Target_20�。
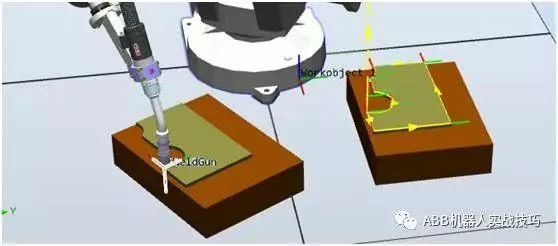
3) 完成左邊起點的示教,為Target_ref_start,如下圖��。
注:如果左邊產(chǎn)品軌跡有旋轉(zhuǎn)�,示教的Target_ref_start相對于左邊產(chǎn)品的姿態(tài)要和Target_20相對于右邊產(chǎn)品的姿態(tài)一致(此處左邊產(chǎn)品旋轉(zhuǎn)了30°,示教的角度z方向也旋轉(zhuǎn)了30°)
4) 插入指令如下
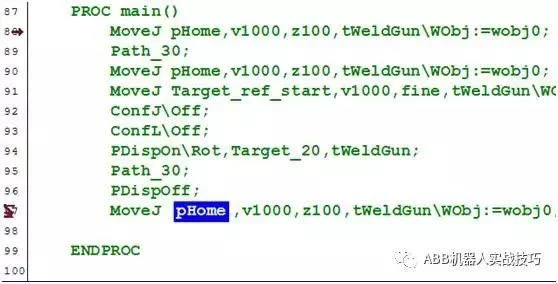
MoveJ pHome,v1000,z100,tWeldGunWObj:=wobj0;//移動到Home位置
Path_30;//運行右邊產(chǎn)品軌跡
MoveJpHome,v1000,z100,tWeldGunWObj:=wobj0;//回到Home
MoveJTarget_ref_start,v1000,fine,tWeldGunWObj:=wobj0;//走到左邊產(chǎn)品起點
ConfJOff;//因為使用偏移��,關(guān)閉軸配置監(jiān)控�����,否則有可能使用原配置參數(shù)導(dǎo)致位置走不到而報錯 ConfLOff; //因為使用偏移����,關(guān)閉軸配置監(jiān)控,否則有可能使用原配置參數(shù)導(dǎo)致位置走不到而報錯
PDispOnRot,Target_20,tWeldGun;//設(shè)定當前位置和Target_20的偏差關(guān)系(包括平移和旋轉(zhuǎn))�,因為此時機器人停在Target_ref_start起點���,即設(shè)定左邊軌跡和右邊軌跡的整體偏移關(guān)系。使用ot表示平移和旋轉(zhuǎn)均計算���。如果不使用ot���,則只使用平移,旋轉(zhuǎn)不計算
Path_30;//運行原有軌跡�����,此時軌跡參考坐標移動關(guān)系����,機器人實際走左邊產(chǎn)品軌跡
PDispOff;//軌跡完成,關(guān)閉平移關(guān)系
MoveJ pHome,v1000,z100,tWeldGunWObj:=wobj0;

